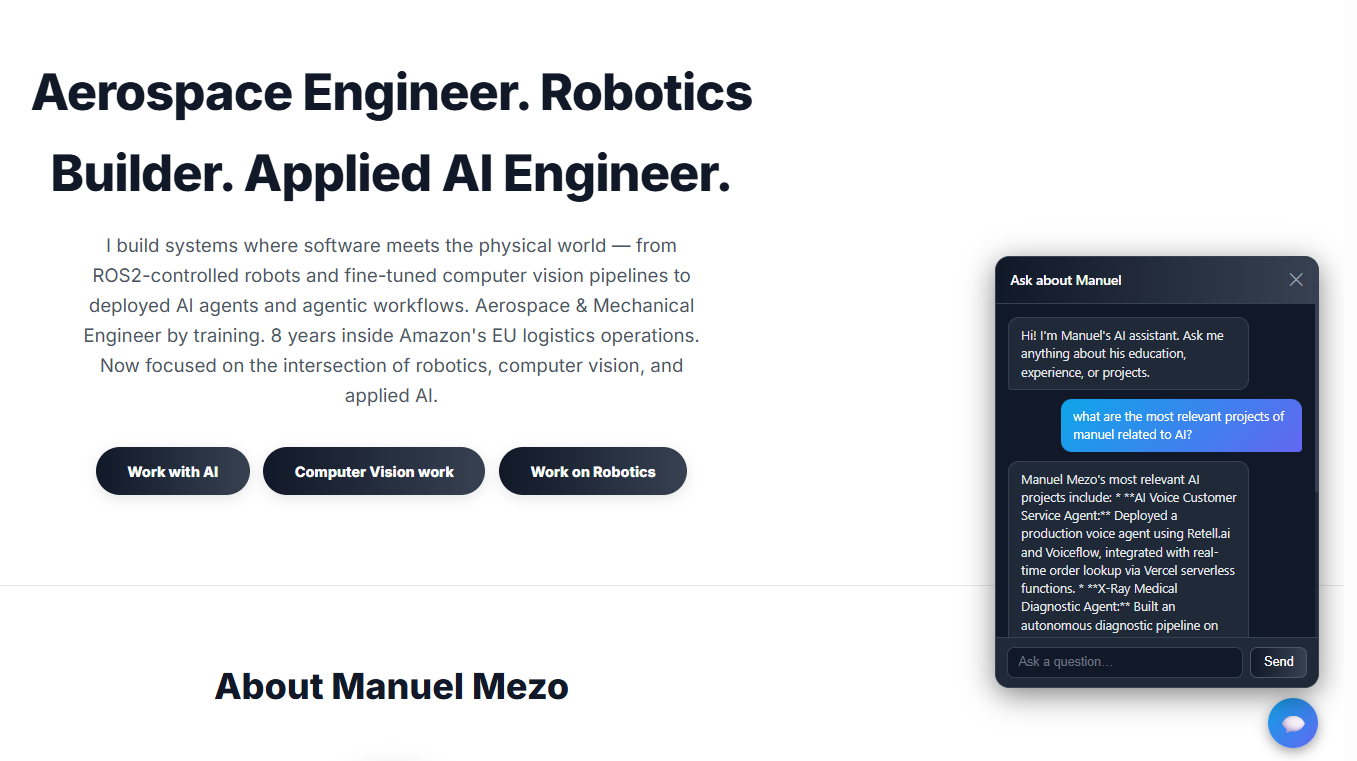
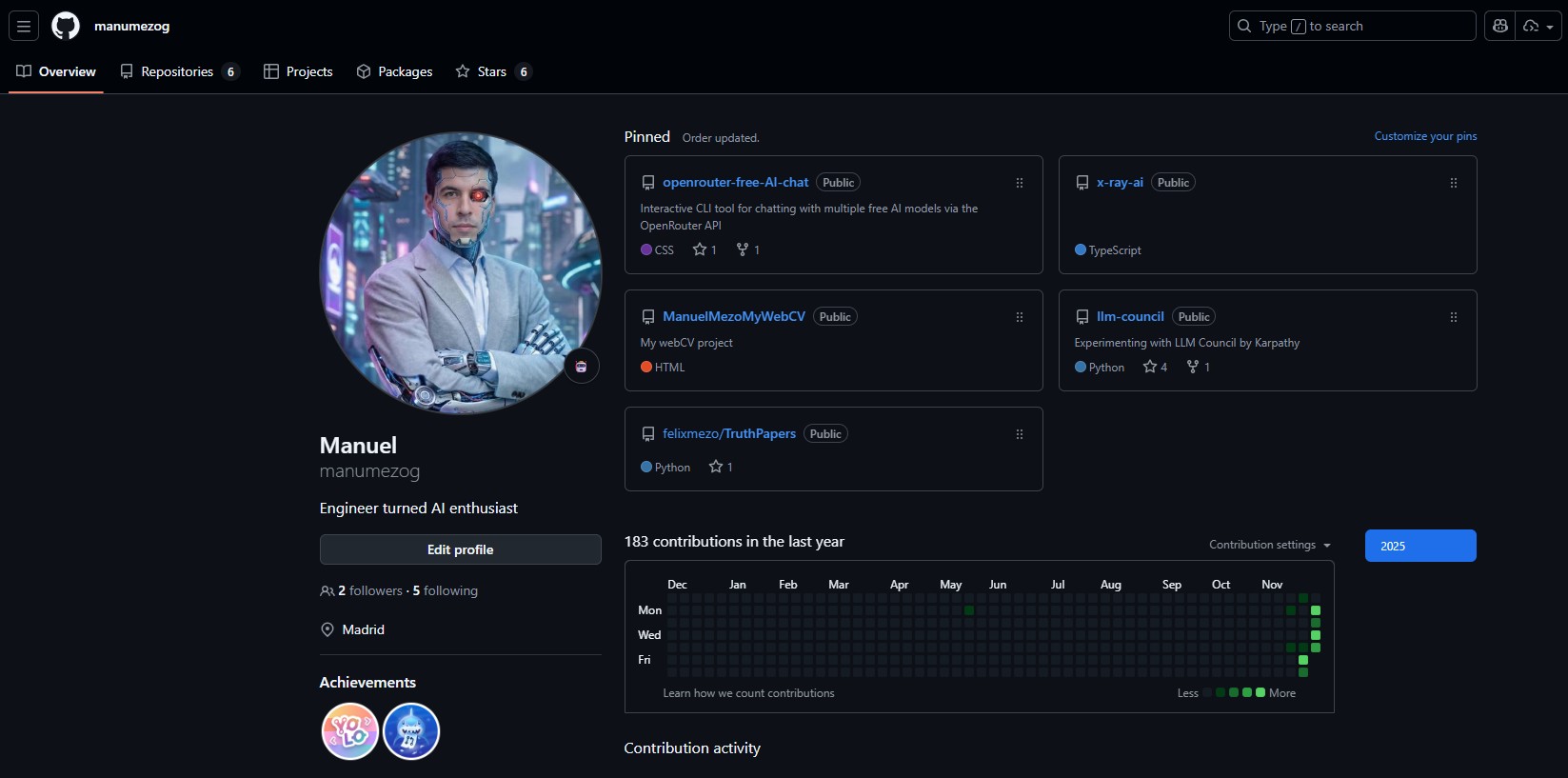
About Manuel Mezo

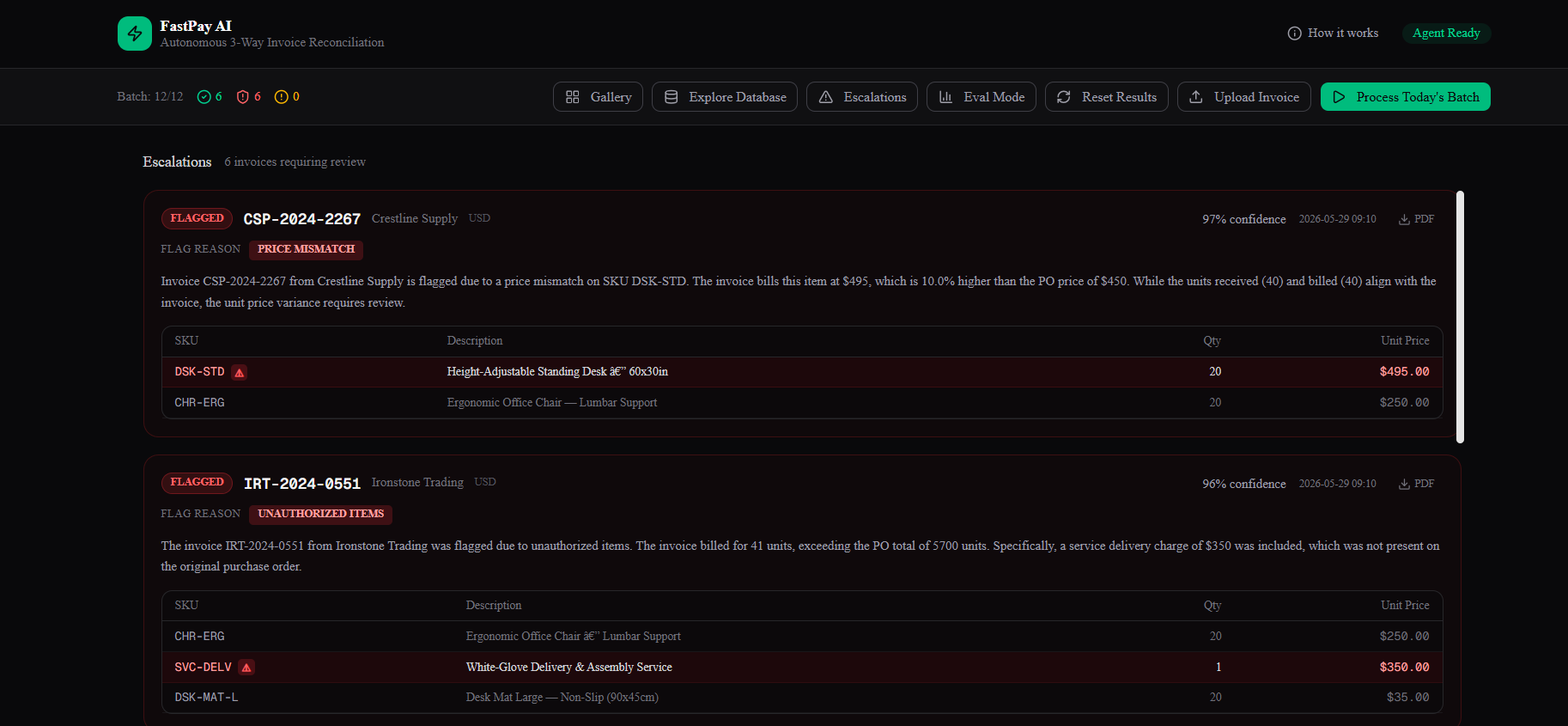
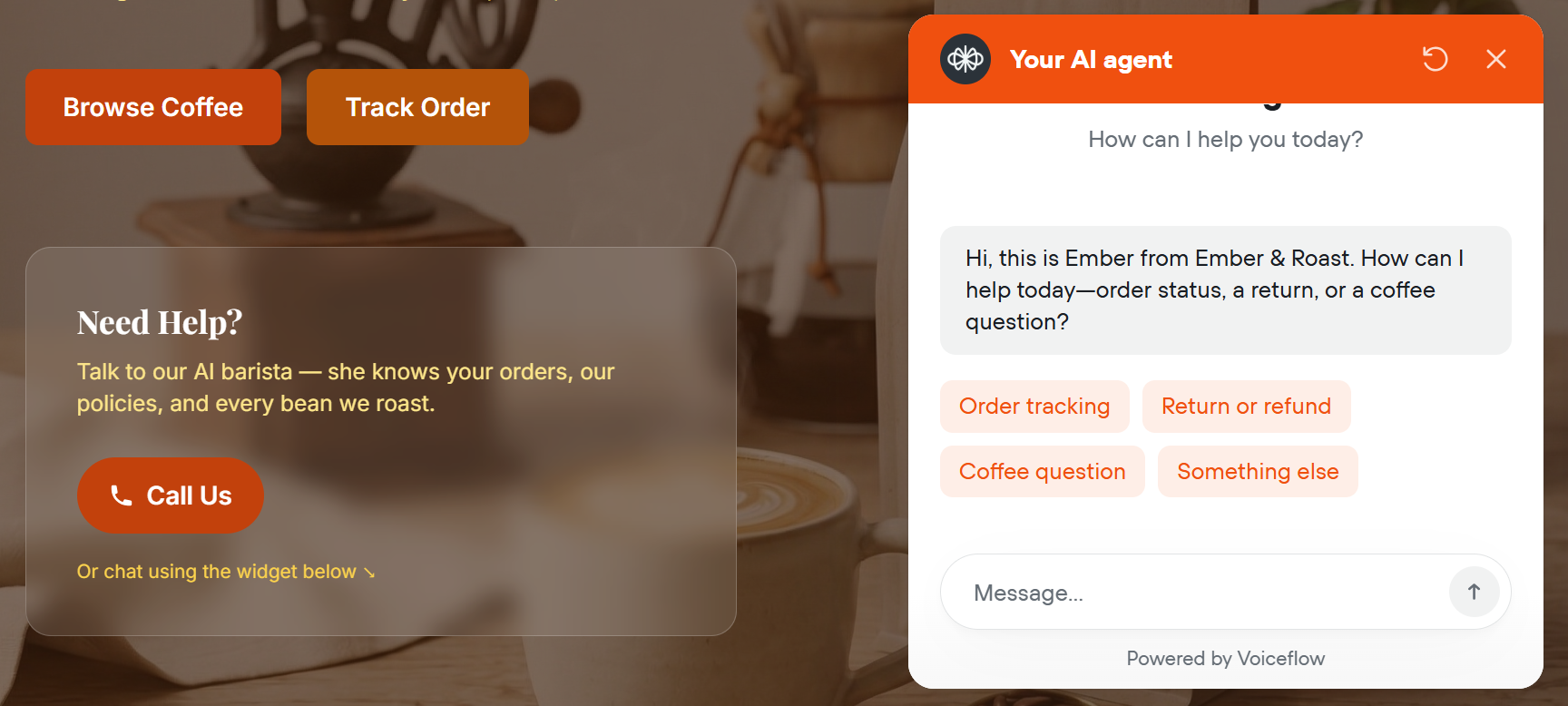
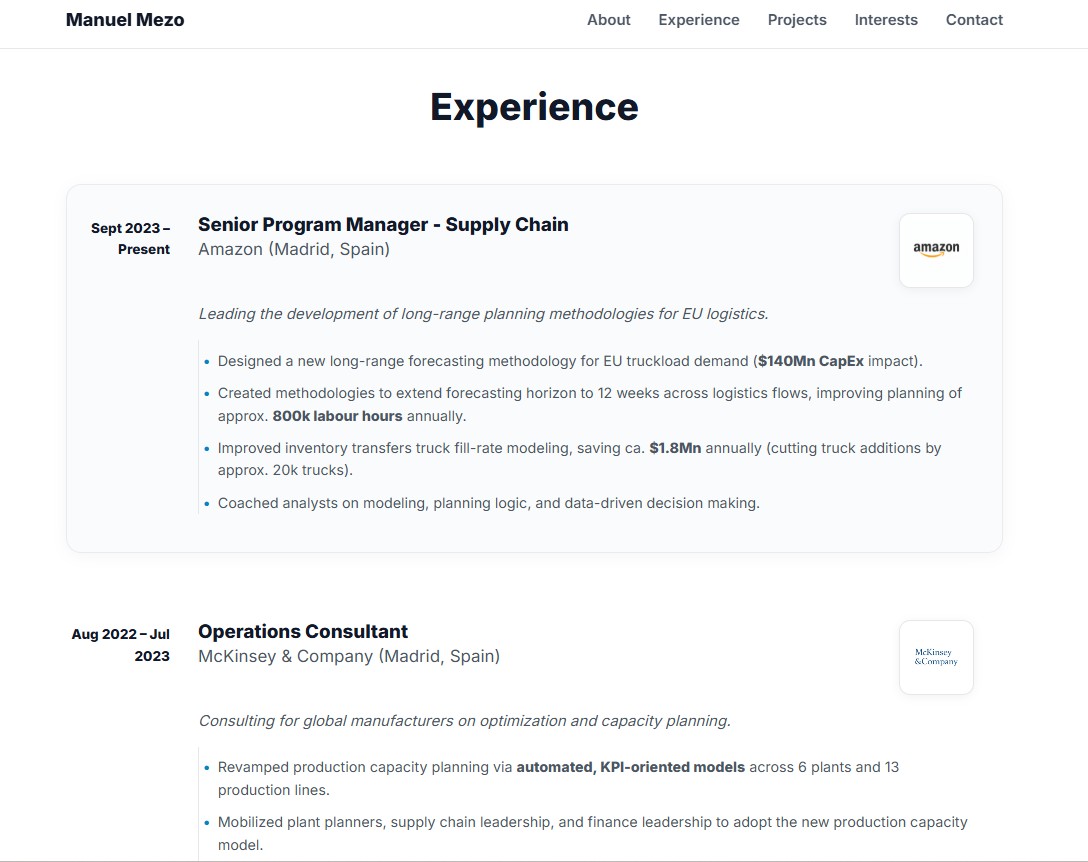
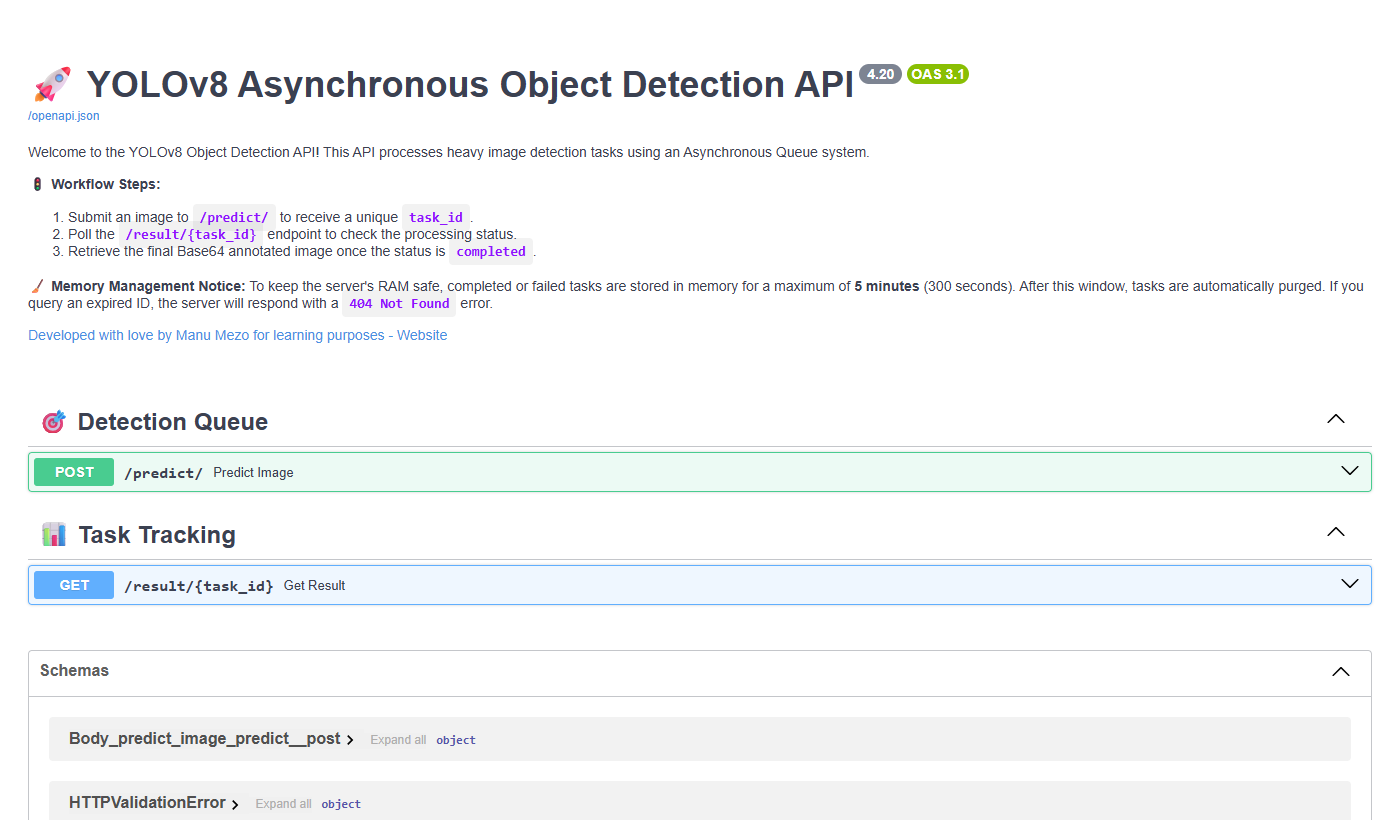
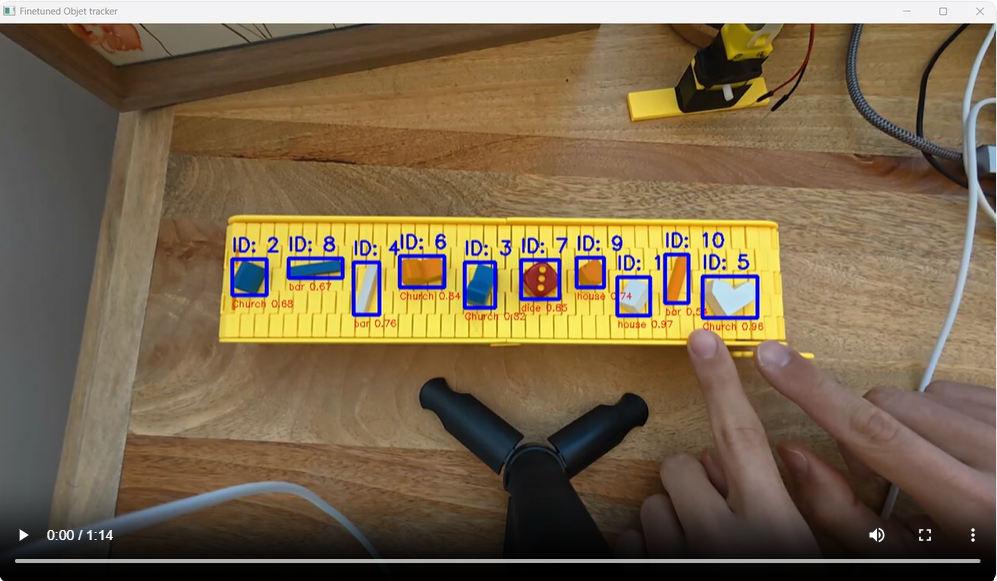
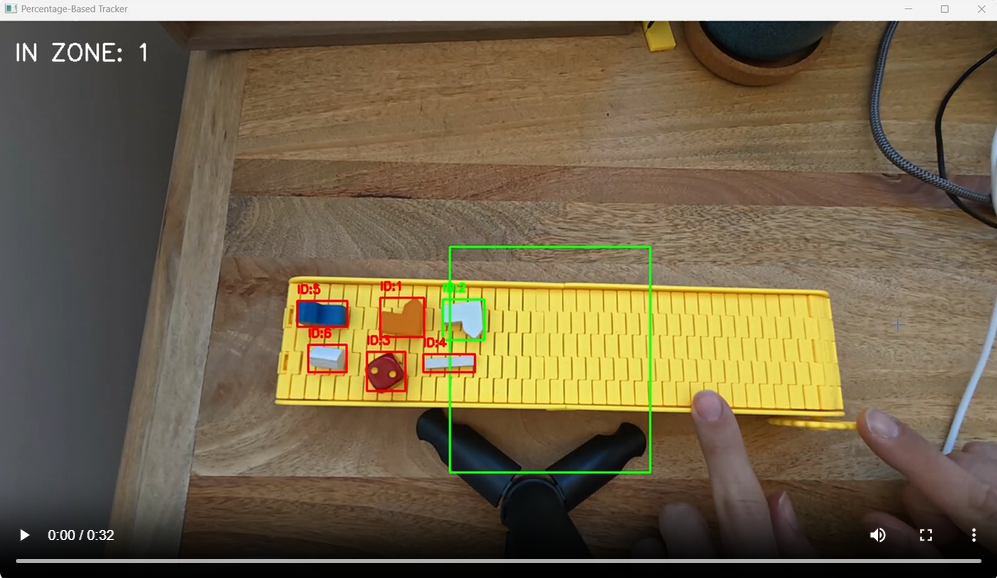
Aerospace and Mechanical Engineer (UC3M · TU Delft) turned applied AI builder, with an 8+ year track record of solving multi-million-dollar operational challenges at Amazon and McKinsey. Now independently shipping production AI systems: end-to-end RAG pipelines, autonomous LLM agents, computer vision, and multi-agent simulations. I combine deep operational instinct for what AI needs to do for real users with hands-on engineering capability across the full stack: Python, FastAPI, cloud infrastructure, ML fine-tuning, and real-time deployment. Seeking an AI Engineer or Robotics Engineer role at a startup, or a Technical PM position where engineering depth is an asset. Fluent in Spanish (native), English (bilingual), and French (B2).